
NEWS
ToF technology takes virtual reality one step further
Tof sensor is an important component to realize AR and VR, making the performance of VR equipment more advanced. DOMI to...

The hardware of the ToF sensor can be divided into a transmitting end and a receiving end. The transmitting end is composed of a VCSEL laser source, a collimating lens and a DOE diffuser, and the receiving end is composed of a narrowband filter, an optical lens and an infrared CIS. 1. VCSEL is more suitable for 3D SensingThere are two types of emission sources, one is edge-emitting (such as LD) and the other is vertical (such as VCSEL). The former generally has a longer wavelength and is used for information transmission; the latter can be used for compressing the volume of the vertical cavity. In smaller applications, it is more suitable as the light source of the tof sensor.CSEL has excellent characteristics such as high efficiency, low power consumption, fast transmission rate, and low manufacturing cost. It has gradually replaced LED as the mainstream choice in 3D Sensing.
Read Featured StorySpeak with our engineering team to find the perfect sensor for your application.
Contact Engineers
Tof sensor is an important component to realize AR and VR, making the performance of VR equipment more advanced. DOMI to...

In recent years, Emergence of cost-effective 3D depth cameras has greatly accelerated the development of robotics and 3D...
Current DOMI tof camera have been applied to the field of face recognition. The highest resolution of DOMI tof camera pr...
Comparing the principles and systems of 3D structured light and Tof sensor, the performance and application scenarios of...

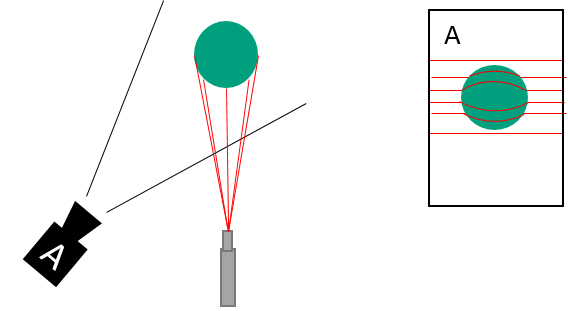
Full name of TOF is Time of Flight.After the light of the modulated light source of the camera is emitted, it is reflect...

As manufacturer of tof sensors, DOMI uses a combination of ToF Camera to create a more efficient robot vision system. Th...

Each pixel inside the ToF camera can get a corresponding distance, and the distance measured by all the pixels constitut...

ToF camera uses active light detection, which usually includes the following parts:

DM_RGBD_5002A ToF camera is based on a new generation of CW pixel design, with a fine resolution of 640×480 and a precis...