A Time-of-Flight (ToF) sensor is a depth-sensing device that measures distance by firing invisible infrared light pulses and timing how long they take to bounce back from an object — essentially radar, but with photons instead of radio waves. It generates a per-pixel distance measurement, producing a 3D depth map rather than a conventional 2D photograph. That’s the fundamental difference: a ToF sensor doesn’t see color, it sees geometry.
Here is a scenario that plays out every day in engineering labs around the world:
Chen, a robotics engineer in Shanghai, has been prototyping an autonomous inventory drone. His stereo vision system works well in the well-lit office, but the moment the drone flies into a dim warehouse aisle, the depth data collapses. Blank concrete walls have no texture for the stereo algorithm to match. He switches to a structured light sensor, and it works in the warehouse, but the moment his drone nears a sunlit loading dock at noon, the IR dot pattern vanishes in the ambient flood. Two sensors, two failure modes, one frustrated engineer.
Chen’s problem isn’t that he picked the wrong sensor. It’s that nobody explained to him why ToF solves both problems at once.
This article covers what a ToF sensor is, how it works at the component level, how the two main types (dToF and iToF) compare, how ToF stacks up against stereo vision and structured light, and what affects real-world performance — so you can evaluate whether ToF fits your application before you order an evaluation kit.
Key Takeaways
– A ToF sensor measures distance by emitting IR laser pulses and timing their return — the core formula is Distance = (Speed of Light x Time) / 2
– Two types exist: dToF (direct pulse timing via SPAD detectors, long range up to 58m, works outdoors at 100k lux) and iToF (phase shift measurement via CMOS sensors, higher resolution at lower cost)
– Key internal components: a VCSEL laser (emitter), a SPAD or CMOS array (receiver), a time-to-digital converter (stopwatch), and a bandpass filter (sunlight blocker)
– ToF works in total darkness, handles bright sunlight with proper design, and captures only depth data — no identifiable images, making it inherently privacy-compliant
– Compared to stereo vision (fails on blank walls and in the dark) and structured light (fails in sunlight), ToF offers the widest operating envelope across lighting conditions
What Is a Time-of-Flight (ToF) Sensor?
The Core Principle — Light as a Ruler
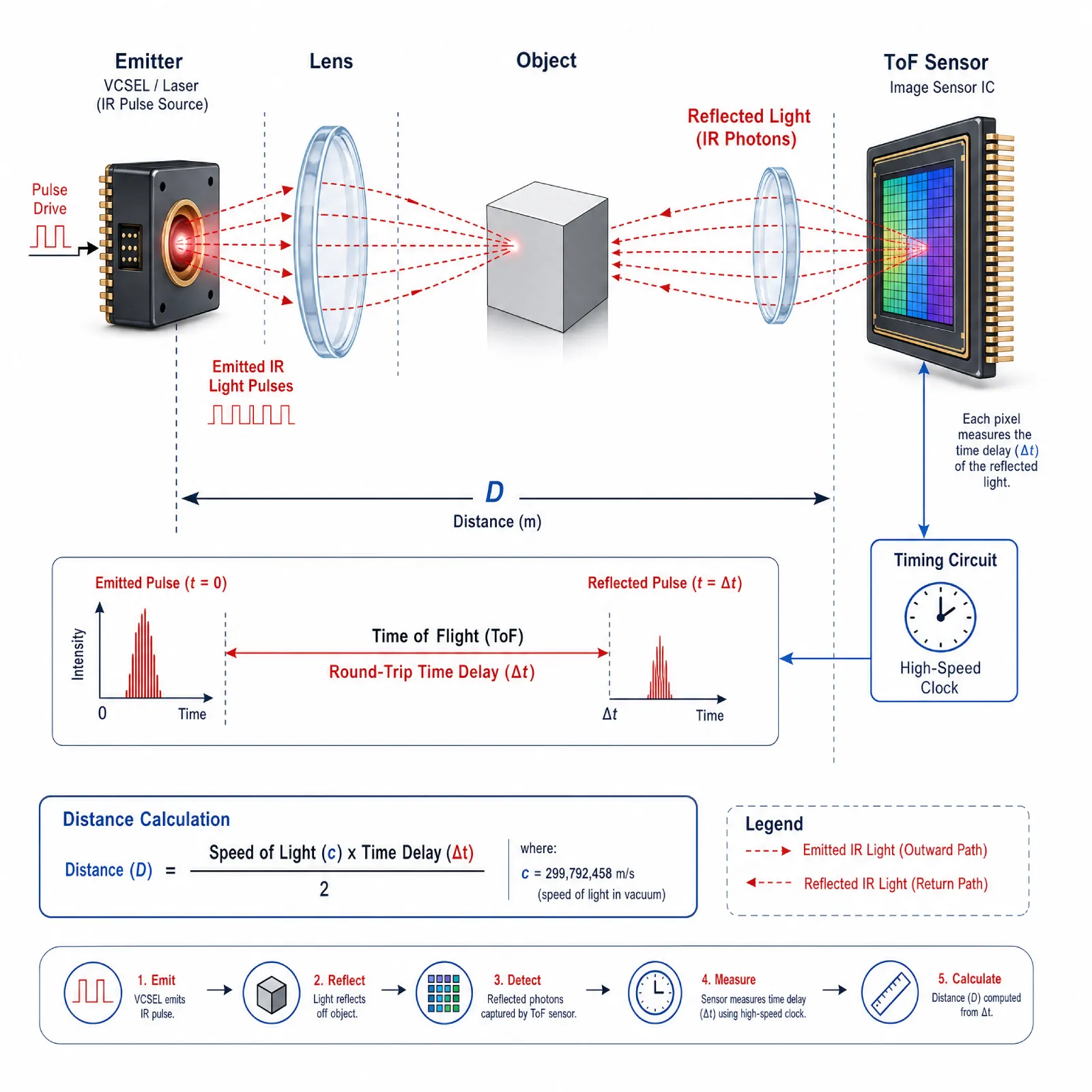
A Time-of-Flight sensor measures how long it takes for a pulse of infrared light to travel from the sensor to an object and back. Since the speed of light is a constant (roughly 3 x 10^8 m/s), the round-trip time directly gives you the distance.
The fundamental equation is:
Distance = (Speed of Light x Time) / 2
The division by 2 accounts for the round trip — the light travels the distance twice, once outbound and once back. At 1 meter, the round trip takes approximately 6.7 nanoseconds. The sensor’s timing electronics need picosecond-level resolution to resolve millimeter-level distance differences, which is why the hardware inside a ToF sensor is non-trivial.
What a ToF Sensor Actually Measures
A conventional 2D camera captures color and brightness per pixel. A ToF sensor captures distance in millimeters per pixel. The output isn’t a photograph — it’s a depth map: a grid of numbers where each value represents how far that point in the scene is from the sensor.
This has a practical consequence that matters more than most engineers realize at first: a ToF sensor doesn’t capture identifiable images of people. It captures geometry. For applications where privacy regulations apply (GDPR, CCPA), that’s a genuine architectural advantage over RGB cameras.
How Does a ToF Sensor Work? — Inside the System
Key Components of a ToF System
Every ToF sensor, from a $1.45 1D ranging chip to a multi-thousand-dollar VGA depth camera, contains four core components:
VCSEL (Vertical-Cavity Surface-Emitting Laser) — The emitter. A semiconductor laser that produces focused infrared light pulses, typically at 850 nm or 940 nm wavelengths. VCSELs are preferred over LEDs because they produce narrower spectrum light (easier to filter from ambient sunlight), faster pulse rise times (sub-nanosecond), and a more uniform beam. The DM0301 1D ToF sensor, for example, integrates the VCSEL directly into its 4.4 x 2.4 x 1.0mm LGA package.
SPAD (Single Photon Avalanche Diode) or CMOS Sensor — The receiver. A SPAD is sensitive enough to detect a single photon. It operates in Geiger mode: one photon triggers an avalanche of electrons, producing a detectable electrical pulse. In dToF systems, SPAD arrays capture the exact arrival time of individual photons. In iToF systems, conventional CMOS pixels measure the phase of a modulated light wave. Both approaches convert light into distance, but they do it differently — more on that in the next section.
TDC (Time-to-Digital Converter) — The stopwatch. A TDC timestamps photon arrivals with picosecond resolution. A typical TDC in a ToF sensor achieves roughly 60 ps resolution, which translates to about 9 mm of distance discrimination per timing bin. The TDC feeds its measurements into a histogram — thousands of pulse cycles are accumulated, and a peak-detection algorithm finds the most likely true distance, filtering out noise from ambient light and dark counts.
Bandpass Filter — The gatekeeper. An optical filter placed in front of the receiver that passes only the narrow wavelength band of the VCSEL (e.g., 940 nm +/- 10 nm) and blocks the rest of the solar spectrum. Without this filter, ambient sunlight would saturate the receiver. With it, a well-designed ToF sensor maintains accurate ranging even under 100,000 lux — equivalent to direct midday sun.
The Measurement Process, Step by Step
Here is what happens inside a dToF sensor during a single depth measurement:
- The VCSEL fires a short IR pulse, typically 1 to 5 nanoseconds wide.
- Light travels outward, hits the target, and reflects back toward the sensor.
- A SPAD pixel detects the returning photon and generates an electrical pulse.
- The TDC records the time between pulse emission and photon arrival — a single timestamp.
- Steps 1 through 4 repeat thousands of times per frame. Each cycle produces a slightly different timestamp because of photon shot noise, ambient light interference, and SPAD dark counts.
- All timestamps are accumulated into a histogram. The bin with the highest count represents the most probable true distance — signal peaks above the noise floor.
- The sensor’s embedded MCU or ASIC converts the histogram peak to a distance value and outputs it over I2C, SPI, or UART.
This histogram approach is why dToF works outdoors. A single pulse might be lost in sunlight noise. Thousands of pulses, statistically aggregated, reliably reveal the signal peak. It’s also why dToF sensors can report a “confidence” value alongside each distance measurement — the sharpness of the histogram peak directly indicates measurement reliability.
dToF vs iToF — The Two Types of ToF Sensors
Direct ToF (dToF) — The Stopwatch Method
dToF measures distance the straightforward way: fire a pulse, start a timer, stop when the photon comes back. The hardware required — SPAD array, high-resolution TDC, histogram engine — makes dToF more expensive to manufacture than iToF, but the performance payoff is real. For a deeper dive into how the two methods compare at the circuit level, SparkFun’s ToF Explained: iToF and dToF is a solid reference.
dToF sensors excel at long range. The DMS604 dToF ranging sensor achieves 58 meters indoors and 35 meters outdoors at 100k lux, with a 1.3-degree field of view and 50 Hz update rate. For a drone flying at 120 meters altitude needing terrain-relative altitude data, or an AGV navigating a sunlit loading yard, dToF is the right tool.
dToF also resists multipath interference better than iToF. Because dToF detects the first returning photon (the shortest path), it’s less likely to report a false distance caused by light bouncing off a wall, then a floor, then back to the sensor.
The primary trade-off is spatial resolution. SPAD arrays are currently smaller than CMOS imaging arrays — 40 x 30 pixels on the DMAS2M001 dToF array module compared to 320 x 240 or 640 x 480 on iToF cameras. For applications that need dense depth maps (face recognition, gesture tracking), iToF is the better fit.
Indirect ToF (iToF) — The Phase Shift Method
Instead of timing individual pulses, iToF emits a continuous modulated light wave — typically a 10 to 100 MHz sine wave — and measures the phase difference between the emitted and reflected signals.
The distance formula for iToF is:
d = c x phi / (4 x pi x f)
where phi is the measured phase shift, f is the modulation frequency, and c is the speed of light.
The sensor samples the reflected wave at four phase offsets (0 degrees, 90 degrees, 180 degrees, 270 degrees) to reconstruct the phase shift. This four-sample method cancels out DC ambient light and yields both distance and signal amplitude per pixel — the amplitude serving as a confidence metric.
iToF has a fundamental limitation called phase wrapping. If the object is farther than the unambiguous range (determined by the modulation frequency), the phase measurement wraps around and produces an ambiguous distance. Higher modulation frequencies give better precision but shorter unambiguous range. Modern iToF sensors handle this by switching between multiple modulation frequencies, using the low-frequency measurement to resolve ambiguity and the high-frequency measurement for precision.
The DMOM2508CL 320 x 240 ToF depth camera uses iToF in a 21 x 9.5 x 6.33mm module drawing 340 mW, purpose-built for AR/VR gesture tracking and people counting — applications where resolution matters more than extreme range.
dToF vs iToF — Side-by-Side
| Feature | dToF (Direct) | iToF (Indirect) |
|---|---|---|
| Measurement method | Direct pulse timing | Phase shift of modulated wave |
| Detector type | SPAD array | CMOS sensor |
| Typical range | 0.02–58m | 0.1–10m |
| Spatial resolution | Lower (40 x 30 to 100 x 100 typical) | Higher (320 x 240 to 640 x 480+) |
| Outdoor performance | Excellent (rated to 100k lux) | Moderate |
| Multipath resistance | Good (first-photon detection) | Challenging (key limitation) |
| Power consumption | Moderate | Low to moderate |
| Relative cost | Higher | Lower |
| Best for | Long-range, outdoor, LiDAR, drones, AGVs | Indoor, AR/VR, face recognition, people counting |
The key insight for sensor selection: dToF wins on range and environmental robustness; iToF wins on resolution and cost. If your robot operates outdoors, pick dToF. If your indoor kiosk needs dense 3D facial geometry at 0.5 meters, pick iToF.
How ToF Compares to Other 3D Sensing Technologies
ToF vs Stereo Vision
Stereo vision uses two cameras separated by a known baseline and triangulates depth from the disparity between the left and right images. It is passive — no illumination needed. This sounds elegant until you try it on a white wall.
Stereo matching requires visual texture. Point a stereo camera at a blank wall, a glass door, or a low-light corridor, and the depth output becomes noise. Active stereo adds an IR pattern projector to create artificial texture, which helps indoors, but the IR pattern washes out in sunlight just like structured light.
ToF is immune to the texture problem. It carries its own light source and measures time, not pattern correlation. A ToF sensor sees a blank white wall and a richly textured poster with equal reliability.
ToF vs Structured Light
Structured light projects a known IR dot or stripe pattern and calculates depth from how the pattern deforms across surfaces. It delivers sub-millimeter accuracy at close range, which is why Apple chose it for Face ID.
The weakness is sunlight. The projected IR pattern is no brighter than ambient IR in direct sun, so the sensor cannot distinguish its own dots from the solar flood. Structured light is strictly an indoors technology.
ToF gets around this with the bandpass filter and histogram approach described earlier. The pulsed laser is orders of magnitude brighter than ambient IR for the duration of each pulse, and the narrowband filter rejects everything outside the laser wavelength. This is why ToF sensors like the DMS604 maintain measurement accuracy at 100,000 lux while structured light sensors are effectively blind.
ToF vs LiDAR — What Is the Difference?
ToF is the measurement principle. LiDAR is a system that uses that principle, typically with mechanical scanning (spinning mirrors) or MEMS mirrors to sweep a beam across a scene, building a point cloud point by point.
The line has blurred significantly. A modern solid-state dToF module like the DMAS2M001 — 40 x 30 SPAD array, 8-meter range, 10 FPS, all in a 7-gram package with no moving parts — is functionally a miniature flash LiDAR. It illuminates the entire scene at once (not scanning) but uses the same SPAD + TDC + histogram architecture as a long-range automotive LiDAR.
The practical distinction for most engineers: consumer/industrial ToF sensors are compact, solid-state, eye-safe (Class 1), and cost tens of dollars. Traditional LiDAR units are larger, often mechanically scanned, and cost hundreds to thousands of dollars. If you need 200-meter range for a self-driving car, buy a LiDAR. If you need 8-meter range for a warehouse robot or a drone, a dToF module is likely the right answer.
Technology Comparison at a Glance
| Scenario | ToF (dToF) | Stereo Vision | Structured Light |
|---|---|---|---|
| Total darkness | Excellent | Fails | Good |
| Bright sunlight (100k lux) | Excellent | Moderate | Fails |
| Blank walls / low texture | Good | Fails | Good |
| Glass / transparent surfaces | Challenging | Fails | Challenging |
| Typical max range | 0.1–58m | 0.3–20m | 0.1–3m |
| Close-range precision | Millimeter | Millimeter | Sub-millimeter |
| Privacy-preserving (no image) | Yes | No | Yes |
| Relative cost | Moderate–High | Low | Moderate |
Explore our full ToF camera module lineup to compare sensors side by side, or contact our engineering team for application-specific recommendations.
Real-World ToF Sensor Applications
Robotics and Autonomous Navigation
Autonomous mobile robots (AMRs) and automated guided vehicles (AGVs) operate in environments that are actively hostile to most depth sensors. Warehouse lighting ranges from pitch-dark aisles to sun-drenched loading bays — sometimes on the same route. Floors may be featureless concrete (stereo fails), and obstacles include glass partition walls (stereo fails again) and thin pallet wrappings.
Consider a team deploying 50 AGVs in a logistics center in Stuttgart. Each AGV needs to detect obstacles reliably across a 12-hour shift spanning indoor rack aisles, refrigerated zones, and outdoor truck bays. The engineering lead tested stereo cameras first — they worked in the brightly lit sorting area but lost tracking entirely in the cold storage aisle where the only lighting was the AGV’s own headlights. Structured light worked in the cold storage but went blind the moment a bay door opened to afternoon sun.
The team eventually deployed dToF sensors on every AGV. One sensor type, every lighting condition, no blind spots. The DMAS2M001 was selected for its 8-meter range, 7-gram weight, and dual USB-C/FPC interface — easy to integrate into an existing ROS stack without mechanical redesign.
Smartphones and Consumer Electronics
iToF dominates the consumer electronics space. The resolution advantage (320 x 240 and higher) enables face authentication, portrait-mode depth-of-field effects, and AR object placement. Power budgets are tight, cost sensitivity is high, and the operating range is short — typically under 2 meters indoors. These constraints exactly match iToF’s strengths.
Drones, Automotive, and Industrial
Drones need lightweight sensors for altimetry, terrain following, and precision landing. A narrow-FOV dToF sensor like the DMS604 provides pinpoint distance data at 50 Hz — fast enough for real-time altitude hold even during rapid descent.
In automotive, in-cabin ToF handles driver monitoring (head position, gaze direction, drowsiness detection) and occupancy sensing (child-left-behind detection, airbag deployment optimization). These applications need reliability across temperature extremes and lighting conditions, making dToF the preferred approach.
Industrial automation uses ToF for volume dimensioning on conveyor belts, robot gripper positioning, and safety zone monitoring. The DM-PS2601 VGA ToF camera adds an on-board NPU for edge AI processing — it outputs not raw depth frames but actual people counts, coordinates, and trajectories, removing the need for a separate host computer.
Smart Home and IoT
Privacy regulations increasingly restrict RGB cameras in public and semi-public spaces. ToF presence detection solves this at the hardware level: the sensor outputs depth data only, with no identifiable image. A smart building can count occupants, optimize HVAC, and detect falls in elder-care facilities — all without capturing a single photograph.
Key Performance Factors — What Affects ToF Accuracy?
Target Surface and Reflectivity
Not all surfaces reflect IR equally. White printer paper reflects roughly 90% of incident 940 nm light. Black denim reflects about 10%. The maximum ranging distance on a dark surface can be half or less of the datasheet specification, which is typically quoted against a 90% reflective white target. Always check the datasheet for range-vs-reflectance curves, not just the headline number.
Multipath interference is the other surface-related challenge. In a corner or near reflective surfaces, light can take multiple paths to the sensor — direct, wall-bounce, floor-bounce — and the sensor must distinguish the true shortest path from the sum of all reflections. dToF handles this better than iToF because the histogram peak from the direct path arrives earlier than any bounced path. iToF sensors, which measure phase rather than time-of-arrival, have a harder time separating direct from multipath signals.
Ambient Light Immunity
Sunlight contains significant IR energy in the 940 nm band — roughly 0.8 W/m^2 per nanometer of spectrum at sea level. A ToF sensor without adequate filtering sees this as a massive DC offset that can saturate pixels and bury the laser signal.
Two design choices determine sunlight performance:
- Wavelength: 940 nm sits in a solar absorption band (water vapor in the atmosphere absorbs some of this energy), giving it a natural advantage over 850 nm for outdoor use. The trade-off is that SPAD photon detection efficiency is lower at 940 nm.
- Bandpass filter quality: A narrowband filter (e.g., 940 nm +/- 10 nm FWHM) passes the laser wavelength and blocks the vast majority of the solar spectrum. Combined with time-gating in dToF, this is how sensors achieve 100k lux ambient immunity.
DOMI sensors are rated for full sunlight operation at 100,000 lux. This isn’t a marketing number — it’s measured performance with the sensor pointed at a target under direct midday sun.
Range vs Accuracy Trade-offs
ToF accuracy is typically specified as a percentage of distance. At 1 meter, +/- 1% means +/- 1 cm. At 10 meters, the same sensor might deliver +/- 10 cm. This linear error growth with distance is inherent to the physics — timing jitter is fixed, but the distance-per-nanosecond relationship means the same timing uncertainty produces a larger distance error at longer range.
At very short range (under 20 mm), some ToF sensors have a minimum distance limitation. The DM0301, for instance, specifies 0.02 meters minimum range. This is set by the pulse width and the receiver’s recovery time after the intense reflection from the emitter pulse itself. For applications needing sub-centimeter minimum range, check this specification carefully.
Eye Safety
All consumer and industrial ToF sensors operate as Class 1 laser products under IEC 60825-1 . This means the emitted energy is below the threshold that can cause eye damage even with prolonged direct exposure. Class 1 is achieved through a combination of low pulse energy, wide beam divergence (spreading the energy across a larger area), and duty cycle limiting. Engineers integrating ToF sensors into products should verify that their mechanical design — particularly cover glass and optical path modifications — does not alter the Class 1 classification.
Frequently Asked Questions
What is a ToF sensor?
A Time-of-Flight (ToF) sensor is a distance-measuring device that emits infrared laser pulses and times how long they take to reflect back from a target. Using the constant speed of light, it converts round-trip time into a precise distance measurement. Unlike a camera, it outputs a depth map — a per-pixel distance reading — not a photograph.
How does a ToF sensor work?
A VCSEL laser emits short infrared pulses. The light travels to the target, reflects, and returns to a SPAD or CMOS detector array. A time-to-digital converter (TDC) measures the photon arrival time with picosecond resolution. This process repeats thousands of times, building a statistical histogram whose peak reveals the true distance. The formula is Distance = (Speed of Light x Time) / 2.
What is the difference between dToF and iToF?
dToF (direct Time-of-Flight) measures the exact round-trip time of individual laser pulses using SPAD detectors and a TDC. It offers longer range (up to 58m) and better outdoor performance. iToF (indirect Time-of-Flight) emits a continuous modulated light wave and measures the phase shift between the emitted and reflected signals. It offers higher spatial resolution at lower cost, making it the preferred choice for indoor consumer applications.
What is the difference between ToF and LiDAR?
ToF is the underlying measurement principle — distance via light travel time. LiDAR is an application of that principle, typically involving mechanical or MEMS scanning to build a point cloud. A modern solid-state dToF module is functionally a miniature flash LiDAR without moving parts. The practical distinction: consumer ToF sensors cost tens of dollars and range up to 8–58m; automotive LiDARs cost hundreds to thousands and range to 200m+.
How accurate are ToF sensors?
Typical accuracy is approximately 1% of the measured distance. A sensor delivering 1 cm accuracy at 1 meter may deliver 5 cm accuracy at 5 meters. Accuracy also depends on target reflectivity — dark surfaces absorb IR and return weaker signals, reducing both range and precision. Always reference the datasheet’s range-vs-reflectance curve for your specific target material.
Does a ToF sensor work in the dark? What about sunlight?
Yes to both. ToF sensors carry their own IR illumination and work in complete darkness. In bright sunlight, properly designed ToF sensors use a narrow bandpass filter that blocks most of the solar spectrum, passing only the laser wavelength. dToF sensors rated for 100,000 lux maintain accurate ranging even under direct midday sun.
What is the maximum range of a ToF sensor?
Range varies by sensor type. Compact 1D ranging sensors like the DM0301 reach 5 meters. 3D dToF modules like the DMAS2M001 reach 8 meters. Long-range industrial dToF sensors like the DMS604 reach 58 meters indoors and 35 meters outdoors at 100k lux. iToF modules typically operate at shorter ranges, under 10 meters.
Are ToF sensors eye-safe?
Yes. All commercially available ToF sensors for consumer and industrial use operate as Class 1 laser products under IEC 60825-1, meaning they are eye-safe under all normal operating conditions. The combination of low pulse energy, wide beam divergence, and limited duty cycle keeps emitted energy below hazardous thresholds.
Bringing ToF Into Your Next Design
ToF sensing has matured from a laboratory technique into a production-ready, compact, and affordable technology. The choice between dToF and iToF comes down to your operating conditions: if your device goes outdoors or needs range beyond 5 meters, dToF is the right call. If you need dense 3D resolution indoors at the lowest cost, iToF is the better fit.
The integration story matters as much as the sensor specs. Pin-compatible drop-in options like the DM0301 — same LGA footprint, same I2C interface, same firmware register map as the VL53L4CD, but with 3.8x the range at a lower unit cost — mean you can upgrade an existing design without touching your PCB layout. For new designs, the DMAS2M001 and DMS604 cover the spectrum from compact 3D depth sensing to long-range precision ranging, with ROS SDKs and multi-platform support that shorten the path from evaluation to deployment.
Browse the full ToF sensor product line for ranging sensors, ToF camera modules for 3D depth cameras, or talk to an applications engineer about your specific requirements. Response within 24 hours, from the team that designed the sensor.