NEWS
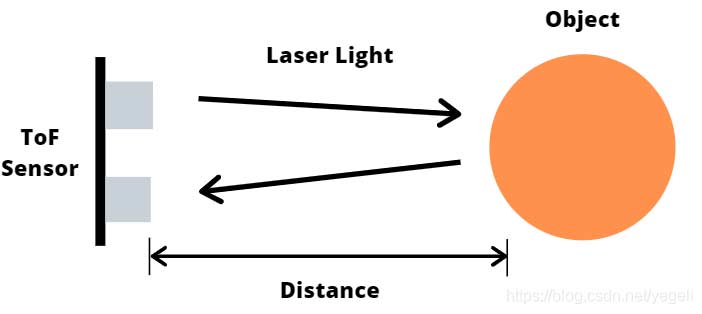
How does the ToF sensor measure distance?
Distance measurement and object detection play an important role in many fields, including factory automation, robotics ...

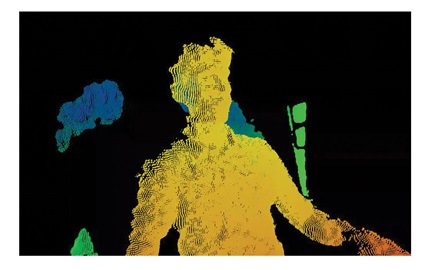
3D depth camera obtains the depth image of the object mainly in two ways: active depth measurement and passive depth measurement. Active depth measurement mainly adopts the tof sensor indirect ranging method, that is, by emitting modulated infrared light, using the ToF area array sensor to receive the reflected back Compared with other depth acquisition methods, ToF technology has the advantages of simple principle, strong anti-interference ability, high imaging accuracy, good portability and easy integration. At present, it has a wide range of applications in many fields such as intelligent monitoring, auto-driving, UAV obstacle avoidance, 3D scene reconstruction, and virtual and augmented reality. ToF technology has the advantages of simple principle, strong anti-interference ability, high imaging accu racy, good portability and easy integration. At present, it has a wide range of applications in many fields such as intelligent monitoring, auto-driving, UAV obstacle avoidance, 3D scene reconstruction, and virtual and augmented reality. 3D depth camera technology uses sensors to measure the distance and contour of the target, and realizes the collection and operation of high-precision 3D information by smartphones. It has the advantages of high effective depth information, long working distance, flexible structure and layout, and rich application scenarios. Specifically, the tof sensor technology can sense 300,000 effective depth information points, and the working distance can reach 2-5 meters, which is many times that of the structured light technology. The baseline of the ToF module is close to zero, compared with the structured light Technology has greatly improved. Specific to the application level, the 3D depth camera ToF can achieve safer and more accurate facial recognition.
Read Featured StorySpeak with our engineering team to find the perfect sensor for your application.
Contact Engineers
Distance measurement and object detection play an important role in many fields, including factory automation, robotics ...

ToF sensor emits modulated near-infrared light, which is reflected after encountering an object, and then obtains the di...

ToF camera and lidar are the same in principle, there is not much difference, ToF camera is more often called depth came...
At present, there are several types of depth cameras, such as ToF camera, structured light, and laser scanning. Mainly u...

DOMI team has rich experience in 3D image, computer vision, image processing and sensor fusion technology. our tof camer...
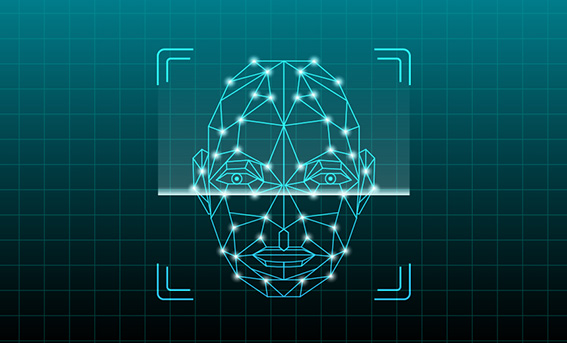
Face recognition is a kind of biometric identification technology based on human facial feature information. A series of...

the ToF sensor has significant advantages in practical applications. For example: post-processing is not required when c...
In addition to iToF series and dToF, DOMI also has RGB camera module series, which can meet customers' different applica...

Compared with other stereo camera measurements, such as triangulation systems, binocular stereo cameras, ToF cameras are...