Common RGB-D cameras with rough intrinsic and extrinsic calibration data are often unable to meet the accuracy requirements required for many robotics applications. Our calibration method is based on a novel two-component measurement error model that unifies the error sources of RGB-D cameras based on different technologies, such as structured light 3D cameras and time-of-flight cameras. The proposed calibration model uses two different The parameters implement the rectification of the image, the two maps provide calibration readings through a linear combination of control functions, and the nonlinear optimization algorithm refines the camera depth sensor rigid displacement as well as the above parameters in a single optimization step, ensuring highly reliable results.
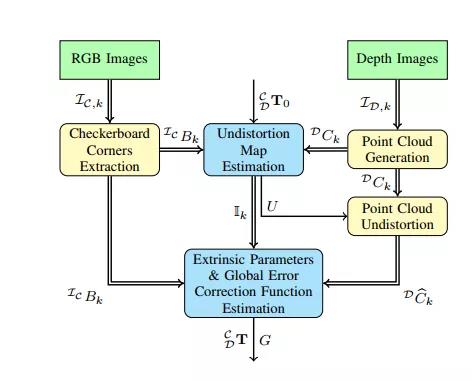
A new method for general RGB-D cameras calibration, the open source calibration procedure only requires the user to collect data in a minimally structured environment, and provides the sensor's internal and external parameters in the output, through two different components, in the first part of the algorithm. The estimation is performed in one stage, and in the second stage of the algorithm, within a robust optimization framework, the depth system error is estimated as well as the camera depth sensor alignment. The article conducts exhaustive experiments with several sensors, and the results show that the method provides highly accurate The results outperform other state-of-the-art methods. Compared to other methods, the method is well suited for different types of depth sensors while requiring relatively simple calibration requirements.